TMC-3D Multi-axis Motion Controller Executes G-code Applications
Product News Tuesday, December 8, 2009: TECHNOSOFT SA
TMC-3D, the Technosoft multi-axis motion controller, is now adapted to execute G-code commands. Today, a lot of industrial applications are defined with these types of motion. G-code is a language, used in numerical control programming, that executes various movements as: piece cutting, profile shaping or drawing, etc. In order to achieve these particular kinds of movement, the numerical control uses basic blocks which carry one or more words, each word consisting of a letter—detailing the function to be performed—followed by a number that assigns value to the function (e.g., N0001 G90 G00 Y125 X2 A23 B-1).
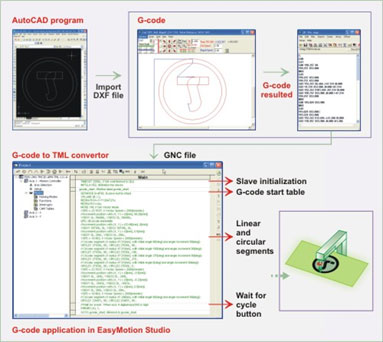
The G-code information is translated into TML commands through the G-code to TML converter integrated in the EasyMotion Studio software. The G-code files are imported into EasyMotion Studio and translated to TML commands. After the conversion process, TMC-3D will send the motion sequences to the drives / motors which execute the movements. The TML converter allows you to set the basic movement parameters specific to the G-code: linear axes, cycle start button, choose the measure units, set the Traverse and Feed rates. Technosoft's G-code–to–TML converter supports various G-code words, letters and parameters together with unary and binary operands.
TMC-3D is able to control two other Technosoft intelligent drives and also includes a 640 W servo drive that may be used to command one of the application axes. The motion programming can be done using PC or PLC motion libraries, or directly at controller level in TML language. EasyMotion Studio automatically generates all the TML instructions, so you don’t need to learn or write any TML code. Powerful TML instructions as: motion commands, program flow control, I/O handling, arithmetic and logic operations are executed / controlled by TMC-3D. Its role is primarily a managerial one, with responsibilities that include network or slave management. It can perform predefined actions as: stopping the motion on all slaves in case of a node failure, or commanding different homing procedures and other motion profiles on each slave.





